山东轩烨机器人科技有限公司是一家以工业机器人以及自动化非标设备于一体的技术企业,公司致力于焊接、切割、机器人机床上下料等领域的机器人智能化研究和产业化应用
查看更多+


公司立足于高端装备制造等战略新兴产业,将追逐“制造2025"致力于机器人技术和互联网技术的深度融合,推动智造。
查看更多+
发布:2024-03-21 浏览:0
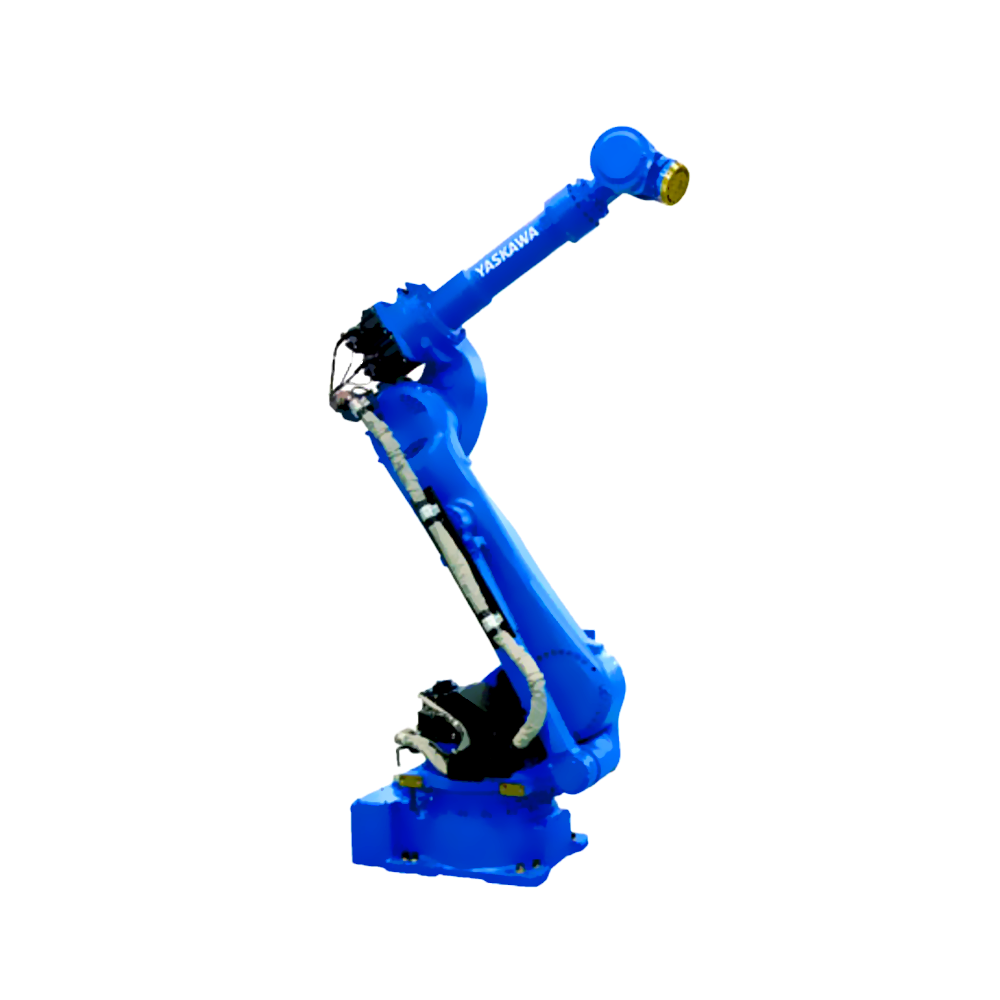
自动化焊接机器人螺柱焊工作站,采用PLC总控制方式。主要包括:对机器人控制,实现手动、自动的操作方式,并保持和机器人的实时通信,在机器人出现故障时能及时反馈信号并停止后续操作;与采用的人机控制界面(触摸屏)进行通信,实现对焊接夹具等工装的控制要求,满足人工操作和工件的装夹;
The automatic welding robot screw welder workstation adopts PLC overall control mode. Mainly including: controlling the robot, implementing manual and automatic operation methods, and maintaining real-time communication with the robot, timely feedback signals and stopping subsequent operations when the robot malfunctions; Communicate with the adopted human-machine control interface (touch screen) to achieve control requirements for welding fixtures and other fixtures, and meet the requirements of manual operation and workpiece clamping;
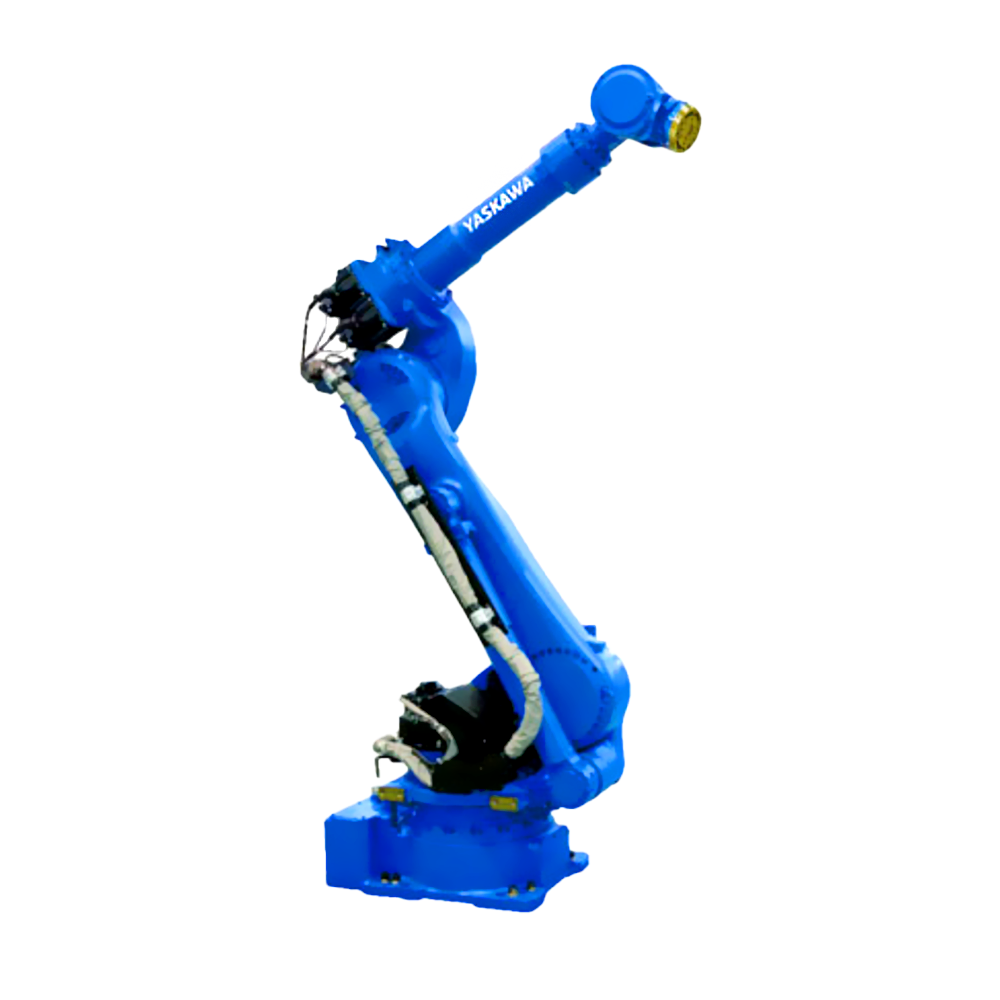
针对系统单元不同的工作程序,如主程序、夹具子程序及螺柱焊枪导电嘴更换程序(亦可以对系统功能进行扩展,实现其他功能)等,通过I/O口设计不同的信号,在按下启动按钮后,PLC将相应信号发送给机器人,由其调用执行不同的子程序,实现相应的动作。 自动化焊接机器人螺柱焊
For different work programs of system units, such as the main program, fixture subroutine, and screw welding gun conductive nozzle replacement program (which can also be extended to achieve other functions), different signals are designed through I/O ports. After pressing the start button, the PLC sends the corresponding signal to the robot, which calls and executes different subroutines to achieve corresponding actions. Automated welding robot screw welding

考虑到机器人工作站的要求,PLC主控系统实现了对工作站各设备单元的报警指示功能,包括控制变压器电源信号、机器人控制柜报警信号、弧焊报警信号、螺柱焊机报警信号、冷却水流量、压缩空气压力、围栏锁及光栅等,通过系统控制界面(触摸屏)和工位状态指示灯进行显示。在任何故障情况下,系统会切断机器人伺服供电电源,中断机器人运行程序,待故障排除之后,重新开始工作。
Considering the safety requirements of the robot workstation, the PLC main control system has implemented alarm indication functions for each equipment unit of the workstation, including control transformer power signal, robot control cabinet alarm signal, arc welding alarm signal, screw welding machine alarm signal, cooling water flow rate, compressed air pressure, fence safety lock and safety grating, etc., which are displayed through the system control interface (touch screen) and workstation status indicator lights. In any fault situation, the system will cut off the power supply of the robot servo, interrupt the robot's running program, and resume work after the fault is resolved.
当弧焊机器人运行到程序设定位置时,会发送一个通知信号给PLC,PLC确认该信号后,发指令给螺柱焊机器人,通知其开始运行,达到程序设定位置时也会发送一个通知信号给PLC,等待其确认后接收后续程序执行指令,即机器人运行指令均由PLC发出,确保机器人运行在区域。
When the arc welding robot runs to the program set position, it will send a notification signal to the PLC. After the PLC confirms the signal, it will send instructions to the screw welding robot to notify it to start running. When it reaches the program set position, it will also send a notification signal to the PLC. After waiting for its confirmation, it will receive subsequent program execution instructions, that is, all robot operation instructions are issued by the PLC to ensure that the robot runs in a safe area.
 微信二维码
微信二维码  抖音二维码
抖音二维码
咨询热线:0531-82766496
15553199811(微信同号)
山东省济南市历城区工业北路5777号中电建能源谷4-B-4
dongjinchuang@126.com
截屏,微信识别二维码