山东轩烨机器人科技有限公司是一家以工业机器人以及自动化非标设备于一体的技术企业,公司致力于焊接、切割、机器人机床上下料等领域的机器人智能化研究和产业化应用
查看更多+


公司立足于高端装备制造等战略新兴产业,将追逐“制造2025"致力于机器人技术和互联网技术的深度融合,推动智造。
查看更多+
发布:2024-06-12 浏览:0
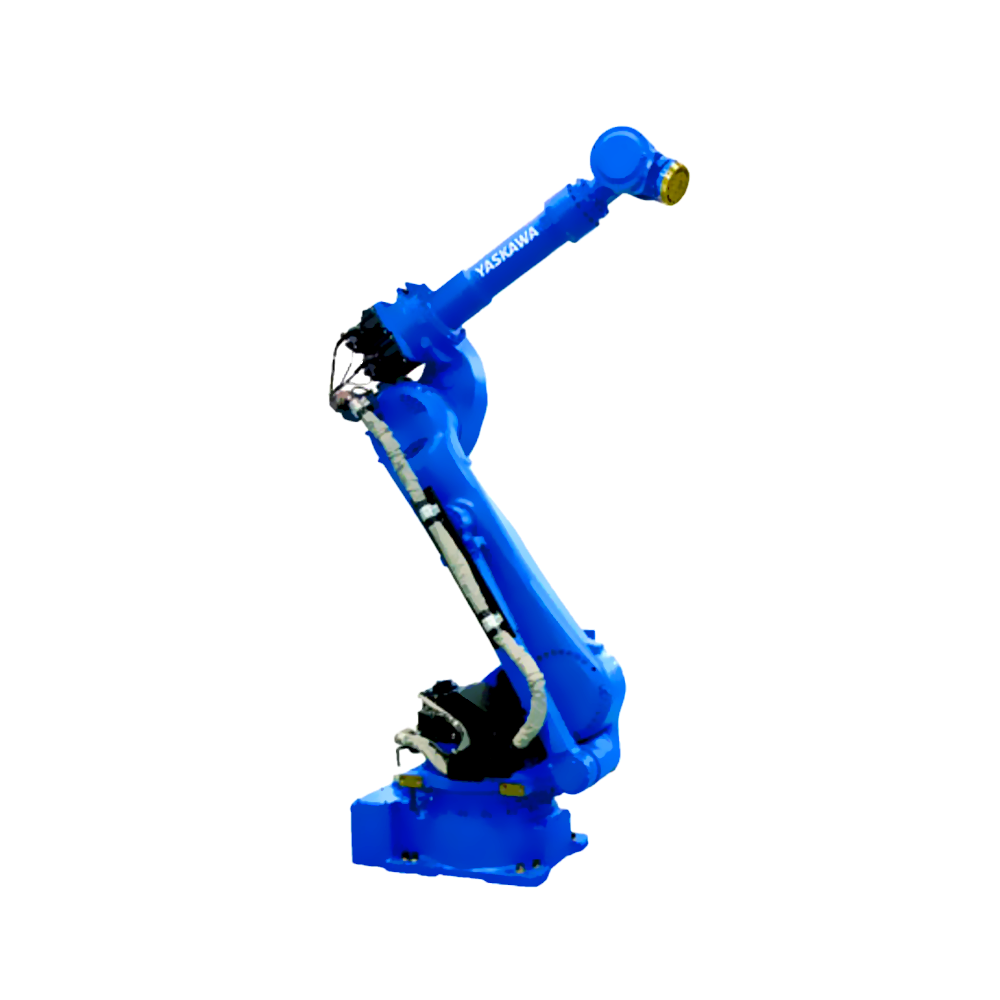
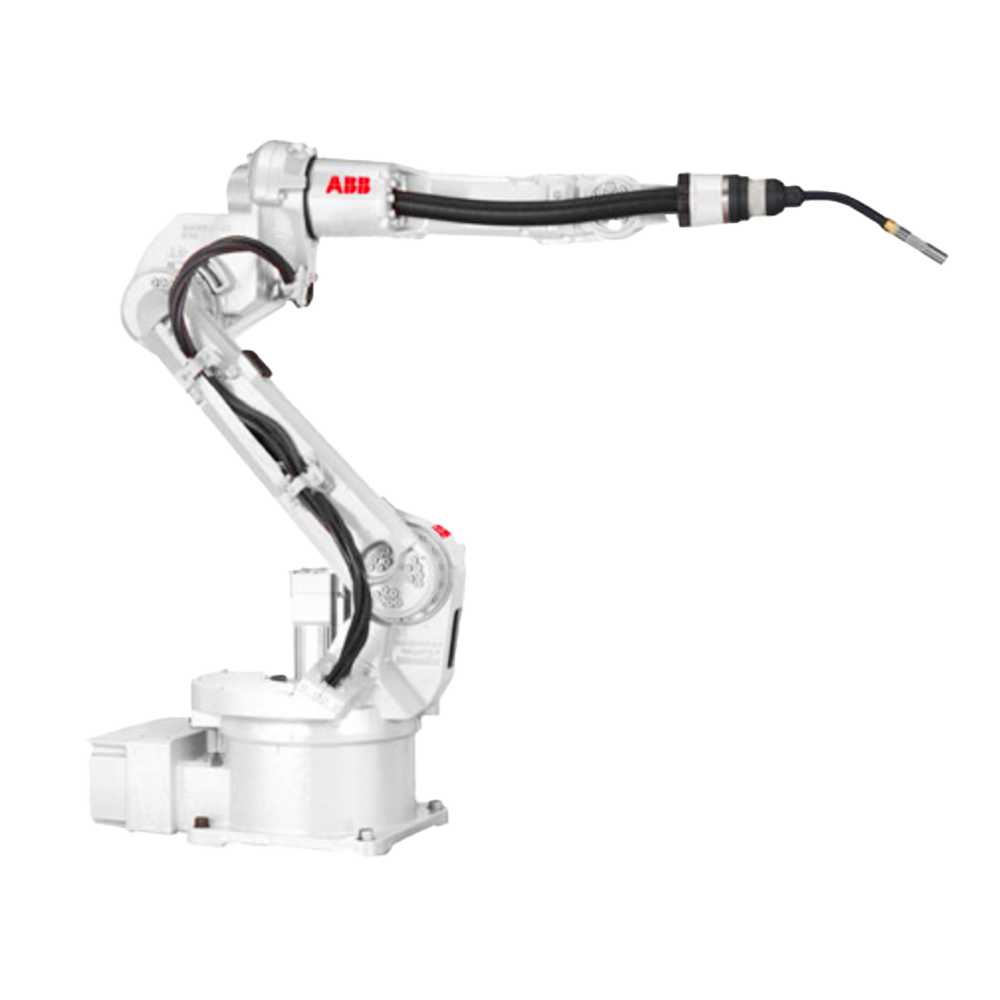
1.机器人类型:安川工业机器人有垂直多关节型和水平多关节型等类型,需要根据应用场景和需求选择合适的类型。
1. Robot types: Yaskawa Industrial Robots have vertical multi joint and horizontal multi joint types, and suitable types need to be selected according to application scenarios and needs.
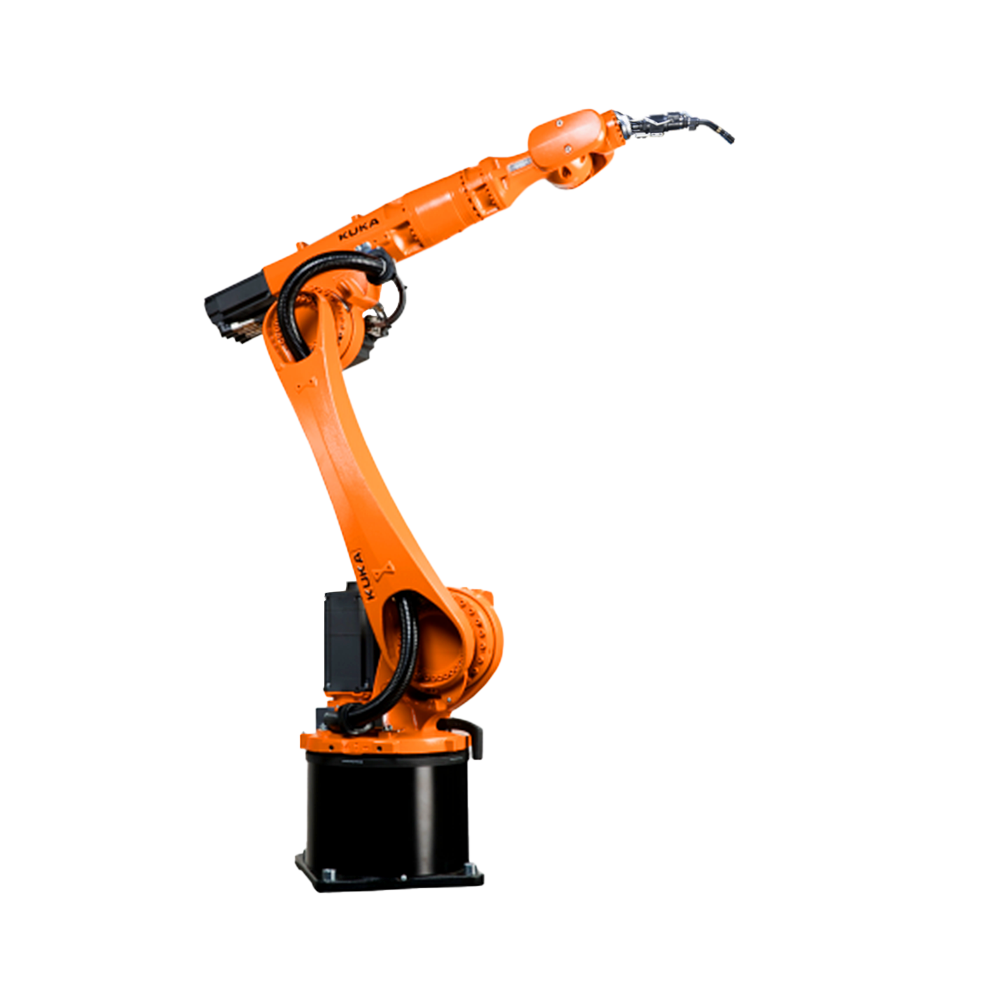
2.自由度:机器人的自由度数一般指的是轴数,它决定了机器人可以实现的运动轨迹和操作灵活性。通用的安川工业机器人是6轴的,但也有针对特定用途的2~7轴的机器人。
2. Degrees of Freedom: The number of degrees of freedom of a robot generally refers to the number of axes, which determines the motion trajectory and operational flexibility that the robot can achieve. The general Yaskawa industrial robots are 6-axis, but there are also 2-7 axis robots for specific purposes.

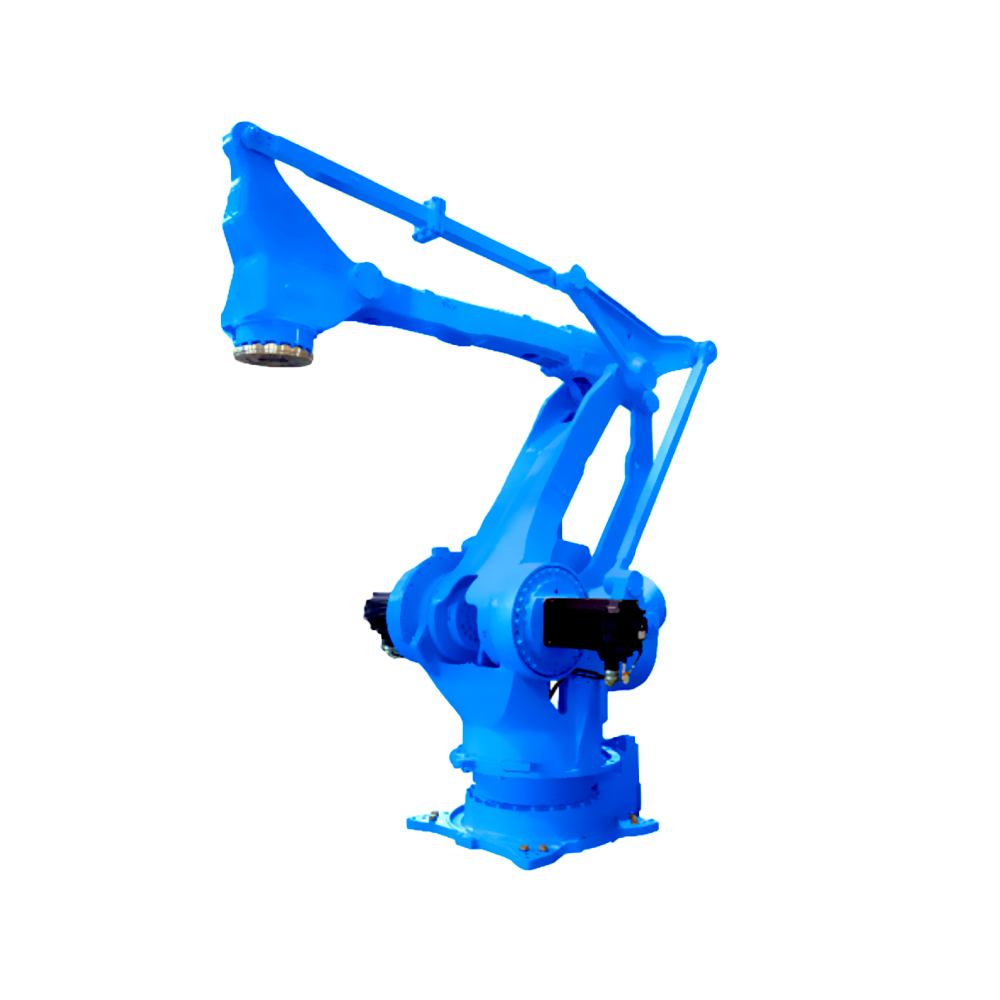
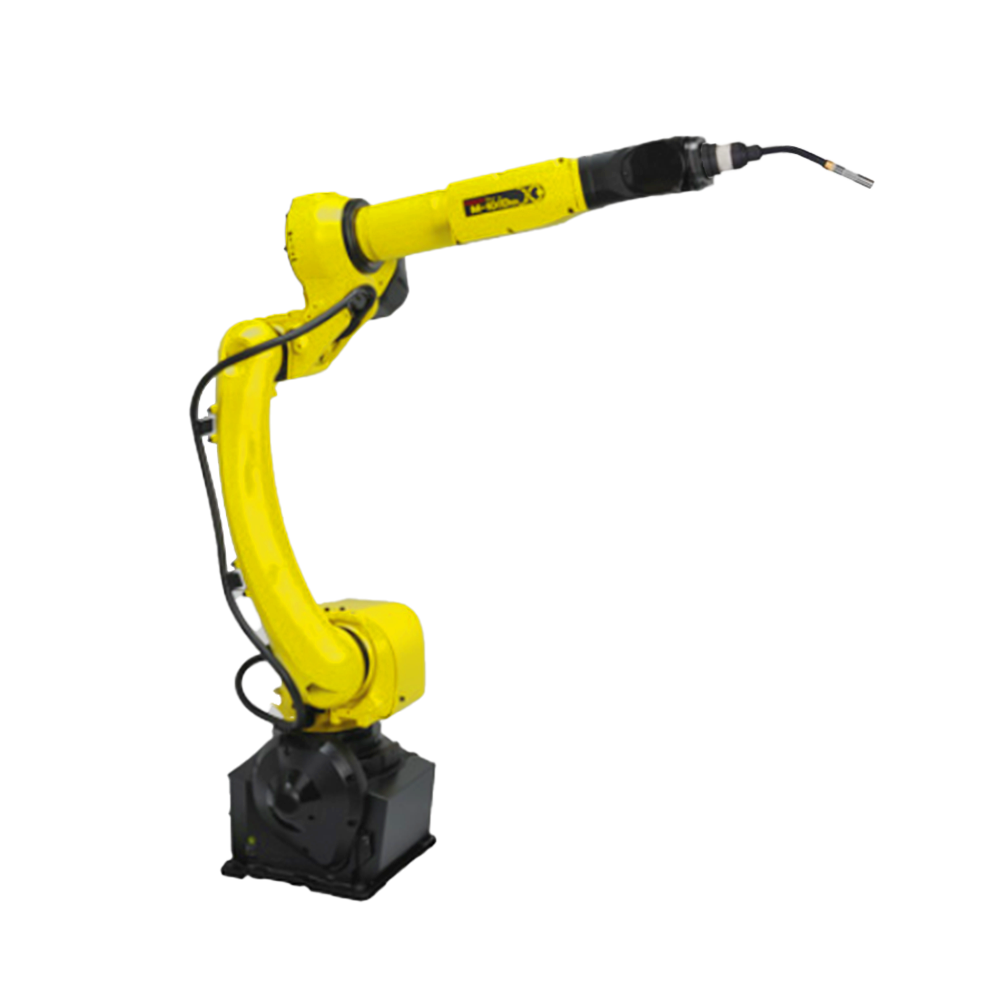
3.可搬运重量:机器人的可搬运重量是指机械臂能够拿起的大重量,需要注意的是,这个重量指的是工件+机械手的重量。
3. Portable weight: The portable weight of a robot refers to the large weight that the robotic arm can pick up. It should be noted that this weight refers to the weight of the workpiece and the robotic arm.
4.重复定位精度:代表机器人的精度高低,精度越高,机器人的运动轨迹越精确。
4. Repetitive positioning accuracy: represents the accuracy of the robot, and the higher the accuracy, the more accurate the robot's motion trajectory.
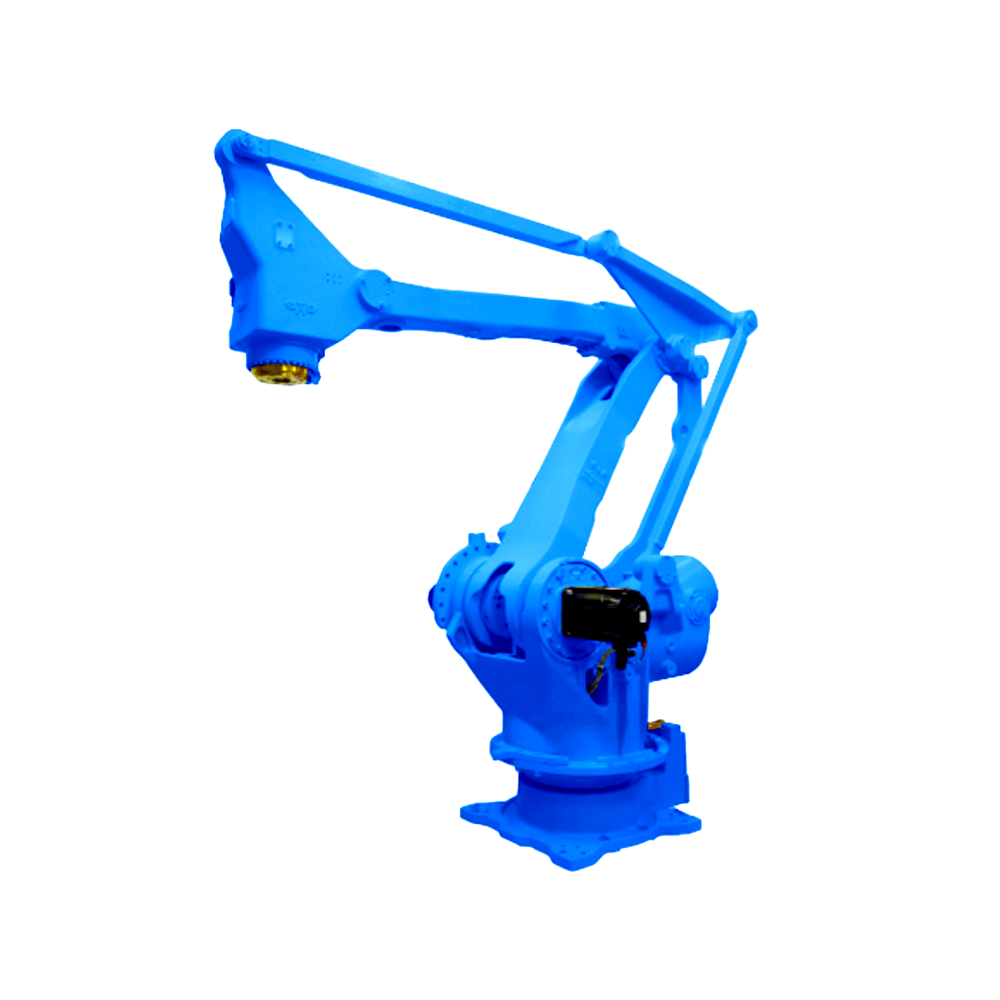
5.动作范围和动作速度:机器人的各轴的动作范围和速度,是决定机器人运动能力和效率的重要参数。
5. Action range and speed: The action range and maximum speed of each axis of the robot are important parameters that determine the robot's motion ability and efficiency.
6.容许负载:机械臂的手腕轴能够容许的力矩和惯性力矩。在考虑机械臂的负载时,需要满足前述的可搬运重量、力矩及惯性力矩这3个条件。
6. Permissible load: The torque and inertia torque that the wrist axis of the robotic arm can tolerate. When considering the load of a robotic arm, it is necessary to meet the three conditions of transportable weight, torque, and inertia torque mentioned above.
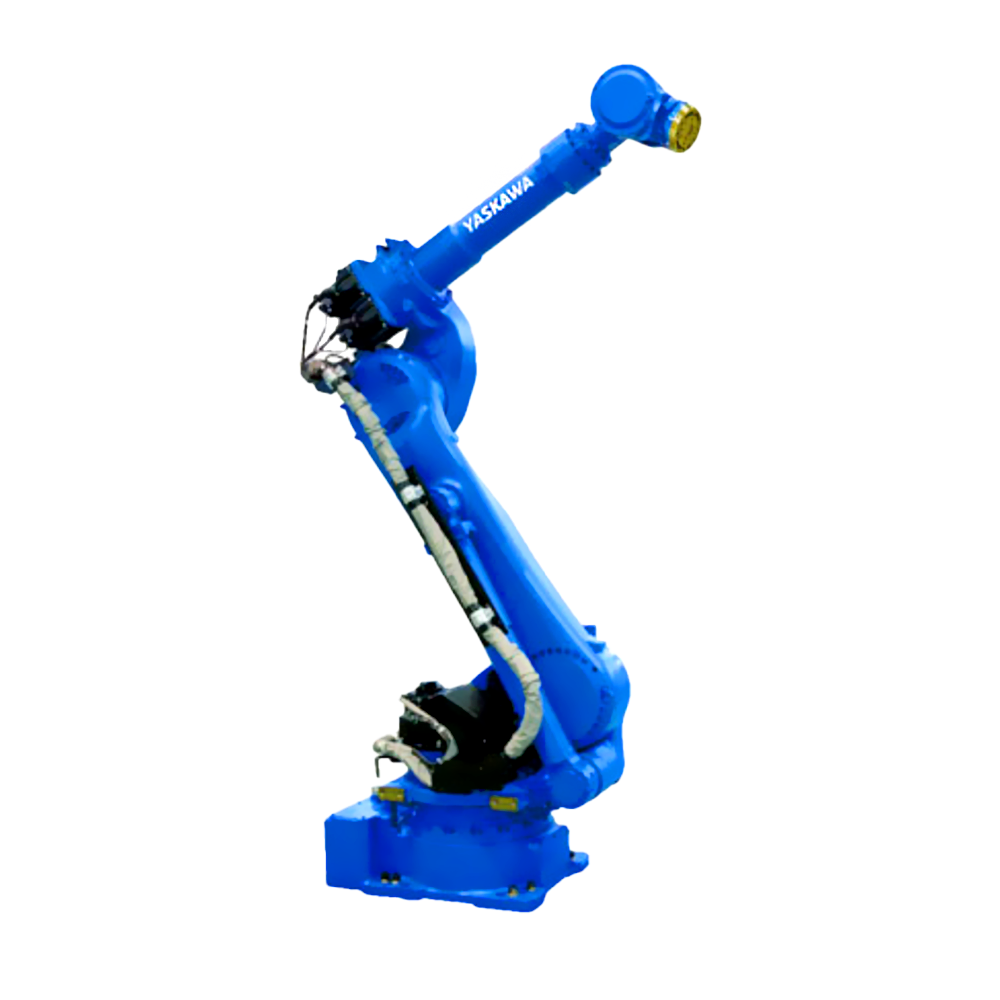
7.设置环境:包括温度、湿度、振动等环境因素,需要考虑这些因素是否满足机器人的使用要求。
7. Setting the environment: including temperature, humidity, vibration and other environmental factors, it is necessary to consider whether these factors meet the requirements of the robot's use.
 微信二维码
微信二维码  抖音二维码
抖音二维码
咨询热线:0531-82766496
15553199811(微信同号)
山东省济南市历城区工业北路5777号中电建能源谷4-B-4
dongjinchuang@126.com
截屏,微信识别二维码