山东轩烨机器人科技有限公司是一家以工业机器人以及自动化非标设备于一体的技术企业,公司致力于焊接、切割、机器人机床上下料等领域的机器人智能化研究和产业化应用
查看更多+


公司立足于高端装备制造等战略新兴产业,将追逐“制造2025"致力于机器人技术和互联网技术的深度融合,推动智造。
查看更多+
发布:2024-05-09 浏览:0
机械手臂通常由3~7个关节组成,关节数量的多少取决于机械手臂的设计和用途。
A robotic arm typically consists of 3-7 joints, and the number of joints depends on the design and purpose of the robotic arm.
一、机械手臂是什么?
1、 What is a robotic arm?
机械手臂是一种运动自由度较高、能够模拟人手动作的机电设备。它由多个关节、动力、控制系统、执行器和传感器等部件组成,可以实现复杂的动作,代替人工完成生产或服务任务。机械手臂广泛应用于自动化生产、仓储物流、医疗护理、交通运输等领域。
A robotic arm is an electromechanical device with high degrees of motion and the ability to simulate human hand movements. It consists of multiple joints, power, control systems, actuators, sensors, and other components, which can achieve complex actions and replace manual production or service tasks. Mechanical arms are widely used in fields such as automated production, warehousing and logistics, medical care, and transportation.
二、机械手臂的关节构成
2、 Joint composition of robotic arms
机械手臂由多个关节和运动轴组成,每个关节及运动轴都有不同的运动方式和限制。通常,机械手臂的关节数量在3~7个左右,关节数量的多少取决于机械手臂的设计和用途。以下是几种常见机械手臂的关节构成:
A robotic arm consists of multiple joints and motion axes, each with different motion modes and limitations. Usually, the number of joints in a robotic arm is around 3-7, and the number of joints depends on the design and purpose of the robotic arm. The following are the joint compositions of several common robotic arms:
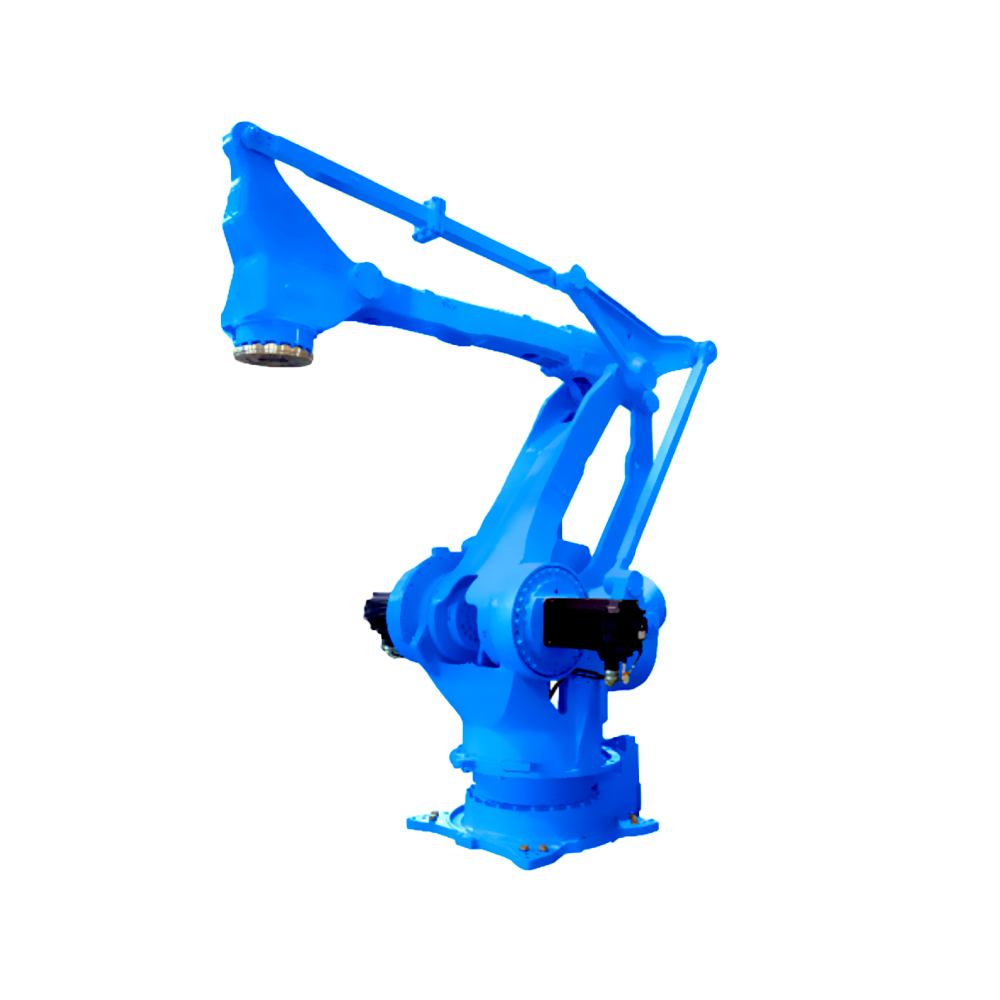
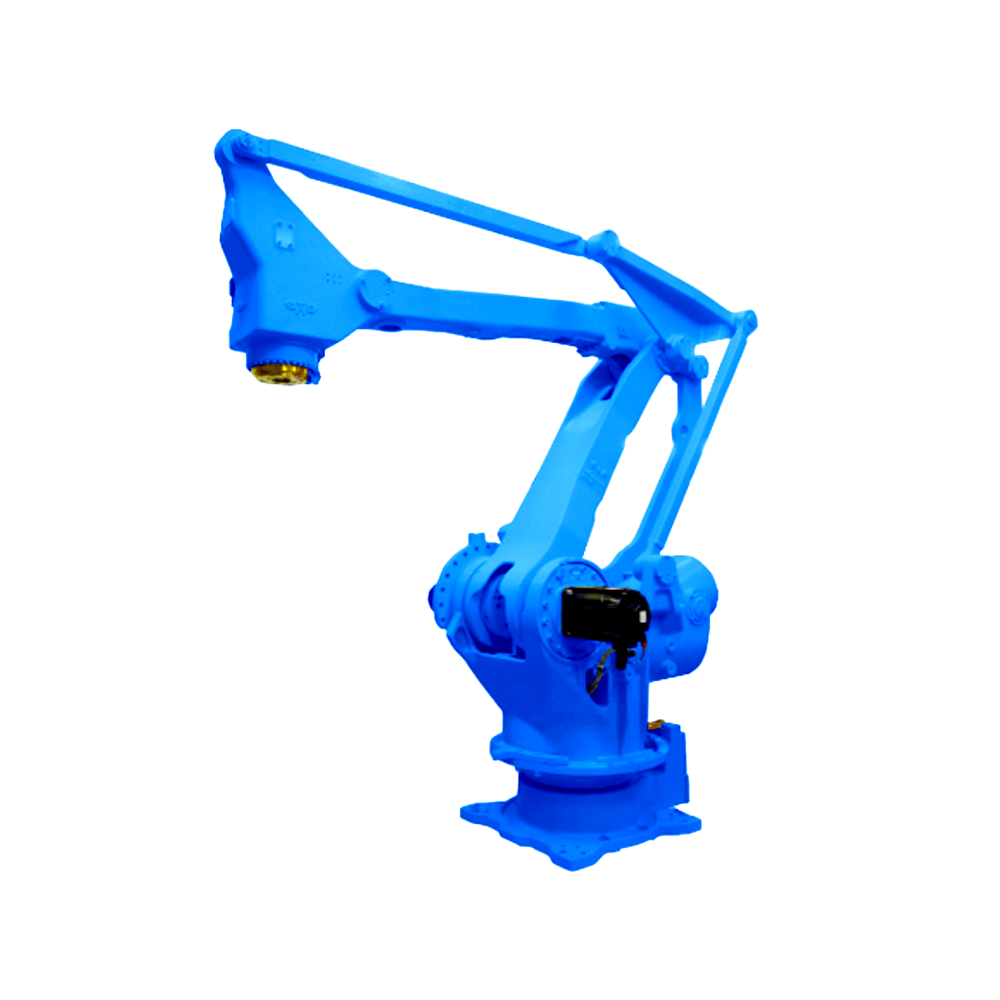
1. 3自由度几何结构:由3个旋转关节构成,每个关节绕不同的轴转动,可以在3个方向上实现运动。
1. 3 degrees of freedom geometric structure: composed of 3 rotating joints, each joint rotates around different axes and can achieve motion in 3 directions.
2. SCARA型机械手臂:由3或4个关节组成,即1个旋转关节和2或3个平移关节,可实现水平平移、垂直上下、旋转和伸缩等多种运动。

2. SCARA type robotic arm: composed of 3 or 4 joints, namely 1 rotary joint and 2 or 3 translational joints, it can achieve various movements such as horizontal translation, vertical up and down, rotation, and extension.
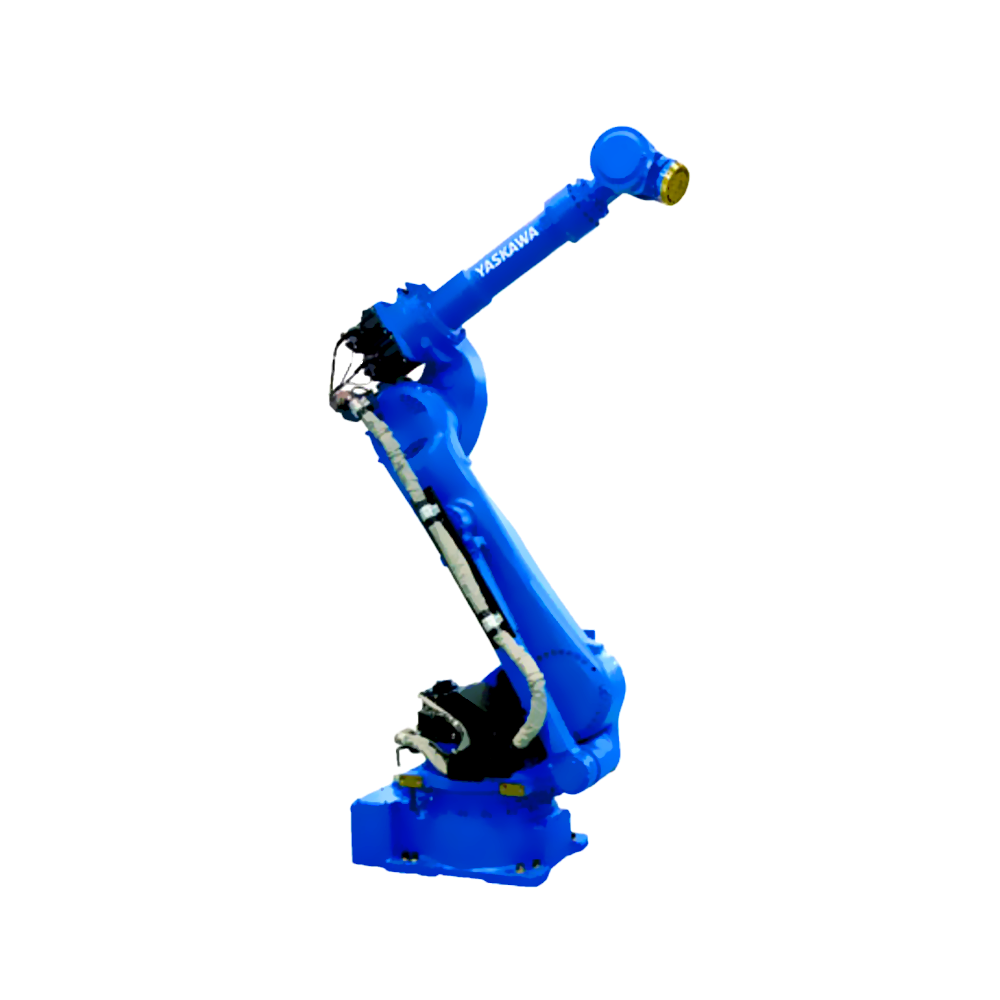
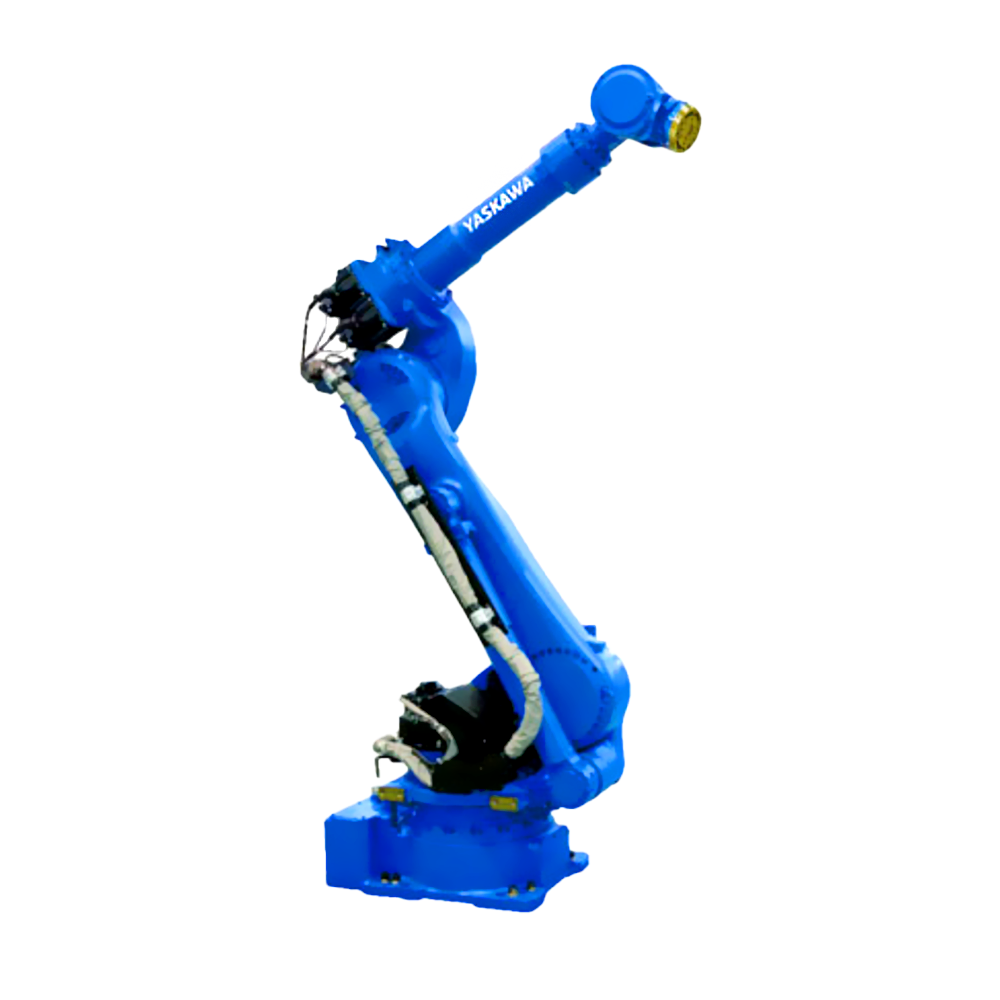
3. 6轴机械手臂:由6个关节构成,分别为旋转关节和伸直关节,可实现6个自由度的运动,机械手臂在X、Y、Z三个方向上分别具有旋转和伸缩的能力。
3. 6-axis robotic arm: composed of 6 joints, namely rotation joint and extension joint, capable of achieving 6 degrees of freedom of movement. The robotic arm has the ability to rotate and stretch in the X, Y, and Z directions.
三、机械手臂关节的功能
3、 The function of robotic arm joints
机械手臂的每个关节都有特定的功能和工作原理:
Each joint of a robotic arm has specific functions and working principles:
1. 旋转关节:可以实现绕一个轴的旋转运动,如3自由度几何结构和6轴机械手臂的关节。
1. Rotary joint: It can achieve rotational motion around an axis, such as the joint of a 3-degree-of-freedom geometric structure and a 6-axis robotic arm.
2. 平移关节:可以实现沿一个方向的直线运动,如SCARA型机械手臂的关节,可用来控制机械臂的平移和伸缩。
2. Translation joint: It can achieve linear motion in one direction, such as the joint of SCARA type robotic arm, which can be used to control the translation and extension of the robotic arm.
3. 伸直关节:通常用于6轴机械手臂上,可以实现机械臂在Z轴上的伸缩运动,使机械臂能够在不同位置和高度上取得物品。
3. Elongation joint: usually used on 6-axis robotic arms, it can achieve the extension and contraction movement of the robotic arm on the Z-axis, allowing the robotic arm to obtain objects at different positions and heights.
四、总结
4、 Summary
机械手臂是自动化生产和服务中不可或缺的设备,在实际应用中具有广泛的优势。了解机械手臂的关节构成和功能对于设计和维护机械手臂都非常重要。
Mechanical arms are indispensable equipment in automated production and services, and have broad advantages in practical applications. Understanding the joint composition and function of robotic arms is crucial for designing and maintaining them.
本文由焊接机械手臂提供技术支持,更多的详细精彩内容请点击我们的网站https://www.xuanyerobot.com我们将会全心全意为您提供满意的服务。
This article is supported by welding robotic arms. For more detailed and exciting content, please click on our website https://www.xuanyerobot.com We will wholeheartedly provide you with satisfactory service.
 微信二维码
微信二维码  抖音二维码
抖音二维码
咨询热线:0531-82766496
15553199811(微信同号)
山东省济南市历城区工业北路5777号中电建能源谷4-B-4
dongjinchuang@126.com
截屏,微信识别二维码