山东轩烨机器人科技有限公司是一家以工业机器人以及自动化非标设备于一体的技术企业,公司致力于焊接、切割、机器人机床上下料等领域的机器人智能化研究和产业化应用
查看更多+


公司立足于高端装备制造等战略新兴产业,将追逐“制造2025"致力于机器人技术和互联网技术的深度融合,推动智造。
查看更多+
发布:2024-02-06 浏览:0
工业机器人主要由主体、驱动系统和控制系统三个基本部分组成。
Industrial robots are mainly composed of three basic parts: the main body, driving system, and control system.
主体 - 即机座和执行机构,包括臂部、腕部和手部,有的机器人还有行走机构。大多数工业机器人有3-6个运动自由度,其中腕部通常有1-3个运动自由度。
The main body, namely the base and actuator, includes the arms, wrists, and hands, and some robots also have walking mechanisms. Most industrial robots have 3-6 degrees of freedom of motion, with the wrist typically having 1-3 degrees of freedom of motion.
驱动系统 - 包括动力装置和传动机构,核心为减速器以及伺服电机,用以使执行机构产生相应的动作。
Drive system - including power device and transmission mechanism, with a reducer and servo motor as the core, to generate corresponding actions for the actuator.
控制系统 - 是按照输入的程序对驱动系统和执行机构发出指令信号,并进行控制。
Control system - It sends command signals to the driving system and executing mechanism according to the input program and controls them.
工业机器人分类
Classification of industrial robots
关于工业机器人的分类,国际上没有指定统一的标准,可按负载重量、控制方式、自由度、结构、应用领域等划分。
There is no unified international standard for the classification of industrial robots, which can be divided by load weight, control method, degree of freedom, structure, application field, etc.
按照结构形态分类如下。
Classified by structural form as follows.
按照应用分类如下。
Classified by application as follows.
工业机器人产业链
Industrial robot industry chain
工业机器人产业链主要是由机器人零部件生产企业、机器人本体生产企业、代理商、系统集成商、终用户构成。本体是机器人产业链的核心,通常,本体企业设计本体、编写软件,采购通过代理商销售给系统集成商,系统集成商直接面向终端客户。有的本体企业和代理商也会兼做系统集成商。
The industrial robot industry chain is mainly composed of robot component production enterprises, robot body production enterprises, agents, system integrators, and end users. Ontology is the core of the robotics industry chain. Typically, ontology enterprises design ontologies, write software, purchase and sell them to system integrators through agents, who directly target end customers. Some ontology enterprises and agents also work as system integrators.
从企业来看,ABB、发那科、库卡和安川电机这四家企业是工业机器人的四大家族,成为世界主要的工业机器人供货商,占据世界约 50% 的市场份额。
From the perspective of enterprises, ABB, Fanuc, Kuka, and Yaskawa Electric are the four major families of industrial robots, becoming the world's major suppliers of industrial robots and occupying about 50% of the world's market share.

工业机器人工作原理
Working Principles of Industrial Robots
机器人的工作原理是一个比较复杂的问题。简单地说,机器人的原理就是模仿人的各种肢体动作、思维方式和控制决策能力。从控制的角度,机器人可以通过如下四种方式来达到这一目标。
The working principle of robots is a relatively complex problem. Simply put, the principle of robots is to mimic various human body movements, thinking patterns, and control decision-making abilities. From a control perspective, robots can achieve this goal in the following four ways.
“示教再现”方式:它通过“示教盒”或人“手把手”两种方式教机械手如何动作,控制器将示教过程记忆下来,然后机器人就按照记忆周而复始地重复示教动作,如喷涂机器人。
"Teaching and reproducing" method: It teaches the mechanical arm how to move through two methods: "teaching box" or "human hand handle". The controller remembers the teaching process, and then the robot repeats the teaching action in a cycle according to the memory, such as a spraying robot.
“可编程控制”方式:工作人员事先根据机器人的工作任务和运动轨迹编制控制程序,然后将控制程序输入给机器人的控制器,起动控制程序,机器人就按照程序所规定的动作一步一步地去完成,如果任务变更,只要修改或重新编写控制程序,非常灵活方便。大多数工业机器人都是按照前两种方式工作的。
Programmable control method: The staff prepares a control program based on the robot's work task and motion trajectory in advance, and then inputs the control program to the robot's controller. Starting the control program, the robot completes the actions specified in the program step by step. If the task changes, it is very flexible and convenient to modify or rewrite the control program. Most industrial robots work in the first two ways.
“遥控”方式:由人用有线或无线遥控器控制机器人在人难以到达或危险的场所完成某项任务。如防暴排险机器人、军用机器人、在有核辐射和化学污染环境工作的机器人等。
"Remote control" method: A person uses a wired or wireless remote control to control a robot to complete a task in a location that is difficult for people to reach or dangerous. Such as riot prevention and rescue robots, military robots, and robots working in environments with nuclear radiation and chemical pollution.
“自主控制”方式:是机器人控制中、复杂的控制方式,它要求机器人在复杂的非结构化环境中具有识别环境和自主决策能力,也就是要具有人的某些智能行为。
Autonomous control method: It is the most advanced and complex control method in robot control, which requires robots to have the ability to recognize the environment and make autonomous decisions in complex and unstructured environments, that is, to have certain intelligent behaviors of humans.
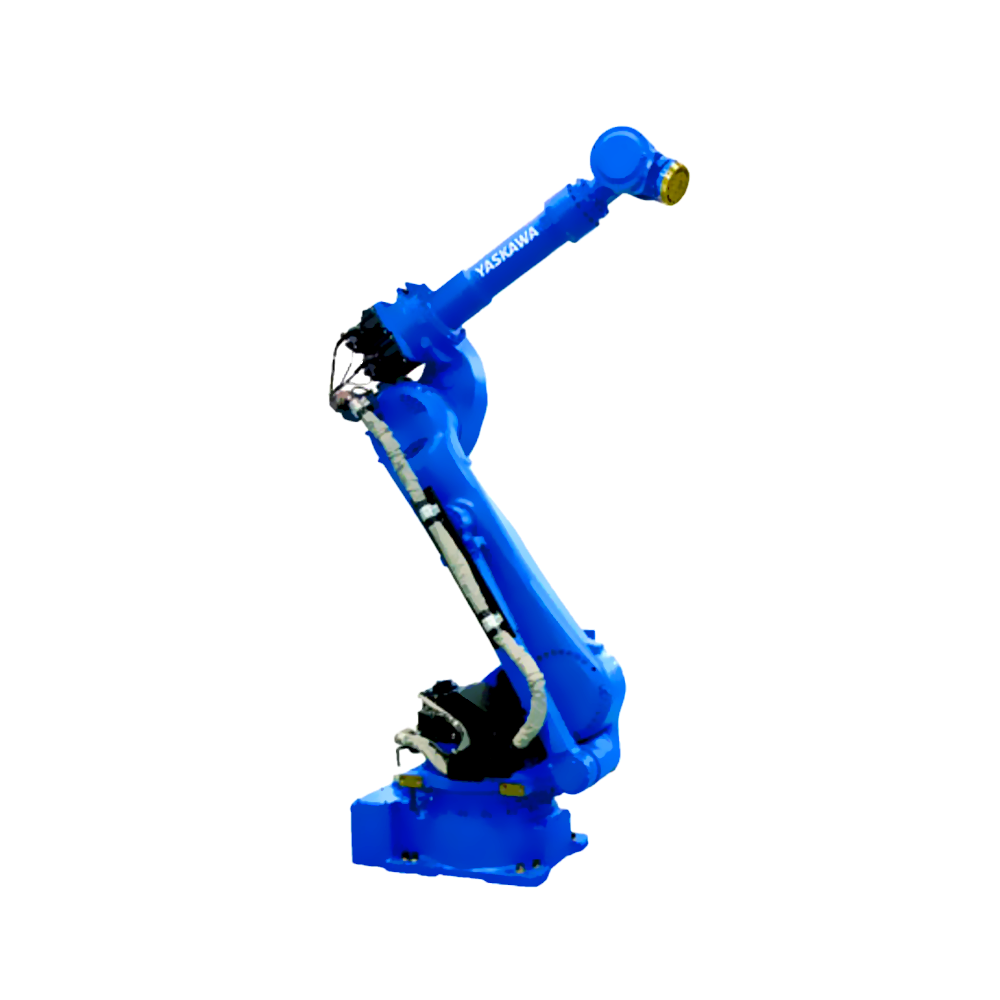
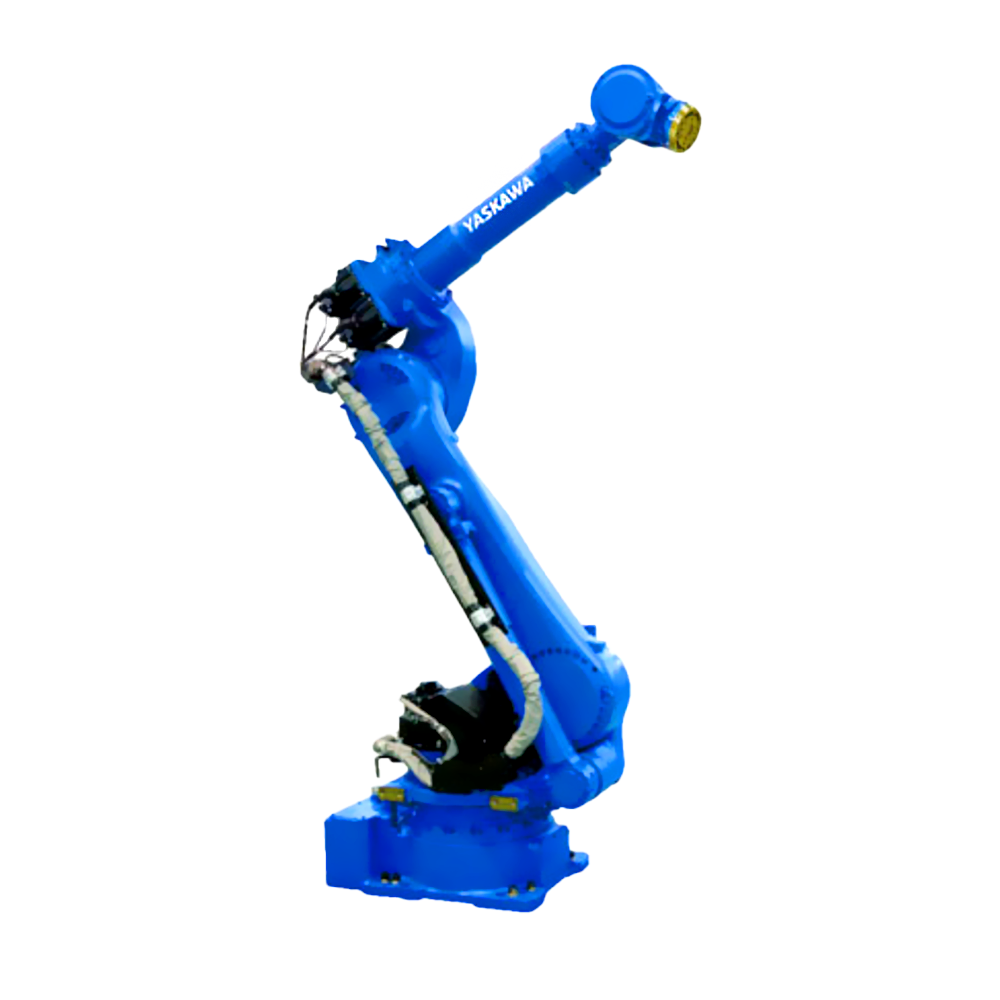
以六轴垂直多关节机器人为例(如下图),通过机器人控制器及其控制系统,可实现S轴回旋,L轴下臂倾动,U轴上臂倾动,R轴手臂横摆,B轴手腕俯仰以及T轴的手腕回旋,实现六个轴的动作操作与配合。
Taking a six axis vertical multi joint robot as an example (as shown in the figure below), the robot controller and its control system can achieve S-axis rotation, L-axis lower arm tilt, U-axis upper arm tilt, R-axis arm lateral swing, B-axis wrist pitch, and T-axis wrist rotation, achieving the operation and coordination of six axes.
以上的文章由山东轩烨机器人科技有限公司工业机器人提供分享,更多内容请关注我们:https://www.xuanyerobot.com.
The above article is shared by Shandong Xuanye Robot Technology Co., Ltd. Industrial Robotics. For more content, please follow us: https://www.xuanyerobot.com.
 微信二维码
微信二维码  抖音二维码
抖音二维码
咨询热线:0531-82766496
15553199811(微信同号)
山东省济南市历城区工业北路5777号中电建能源谷4-B-4
dongjinchuang@126.com
截屏,微信识别二维码